来源:"中国船舰研究"订阅号
2020-11-20
分享到目前多船编队控制的研究主要是针对系统无穷时间收敛的控制问题,即系统从初始状态收敛到平衡点的时间无穷大。而从时间优化观点来说,能使控制系统在有限时间内收敛的方法是时间最优的控制方法。为此,针对速度测量值不可直接使用和有界环境干扰下的多艘船舶,研究分布式编队的有限时间控制问题。
首先,仅根据船舶的位置测量值信息,设计有限时间观测器(finite-time observer,FTO)以观测船舶的速度信息,使得观测误差在有限时间内收敛;其次,在领航信息仅局部已知的通信结构下,基于观测值和齐次法设计有限时间编队控制器(finite-time formation controller,FTFC),实现多艘船舶在有限时间内跟踪期望航迹并同时保持期望的队形,以及利用齐次性理论以及李雅普诺夫稳定性判据证明闭环系统的所有误差都能在有限时间内收敛;最后,通过仿真对比分析所提出的分布式编队的有限时间控制方法与传统渐近收敛的编队控制方法的优劣。
研究结果表明,本文所提出的基于有限时间观测器作用下的多船分布式编队的有限时间控制方法可以使船舶的编队误差及其观测误差收敛到0附近,保证了船舶在有限时间内实现期望的队形,且比渐近收敛的编队控制方法,在不需要提供更多控制力的前提下,具有更快的收敛速度、更高的控制精度以及更强的抗干扰能力。
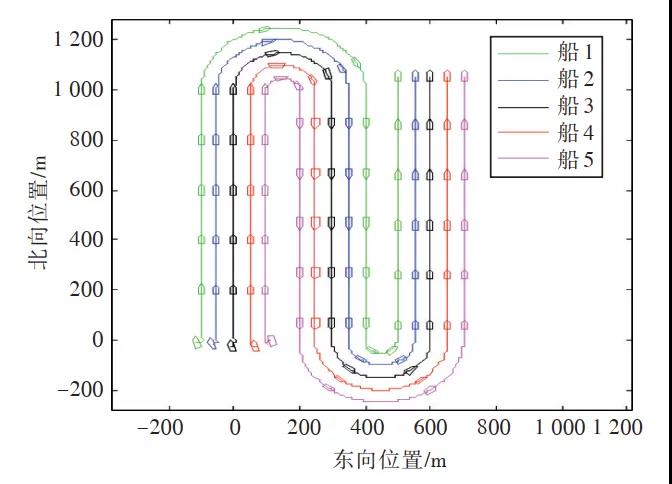
图一 多船编队队形图